原子力显微镜(AFM)各种成像模式的原理
1. 原子力显微镜(AFM)的基本原理
原子力显微镜(Atomic Force Microscopes,AFM)的基本原理是:将一个对微弱力极敏感的微悬臂一端固定,另一端有一微小的针尖,针尖与样品表面轻轻接触,由于针尖尖端原子与样品表面原子间存在极微弱的排斥力,通过在扫描时控制这种力的恒定,带有针尖的微悬臂将对应于针尖与样品表面原子间作用力的等位面而在垂直于样品的表面方向起伏运动。利用光学检测法或隧道电流检测法,可测得微悬臂对应于扫描各点的位置变化,从而可以获得样品表面形貌的信息。下面,我们以激光检测原子力显微镜(Atomic Force Microscope Employing Laser Beam Deflection for Force Detection, Laser-AFM)——扫描探针显微镜家族中最常用的一种为例,来详细说明其工作原理。
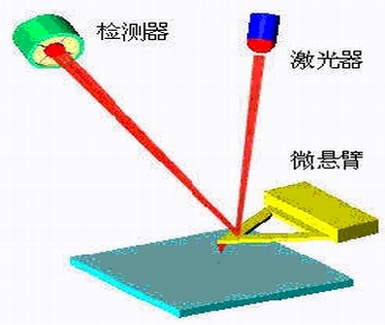
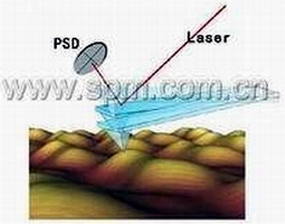
激光检测原子力显微镜/AFM探针工作示意图
如上图所示,二极管激光器(Laser Diode)发出的激光束经过光学系统聚焦在微悬臂(Cantilever)背面,并从微悬臂背面反射到由光电二极管构成的光斑位置检测器(Detector)。在样品扫描时,由于样品表面的原子与微悬臂探针尖端的原子间的相互作用力,微悬臂将随样品表面形貌而弯曲起伏,反射光束也将随之偏移,因而,通过光电二极管检测光斑位置的变化,就能获得被测样品表面形貌的信息。
在系统检测成像全过程中,探针和被测样品间的距离始终保持在纳米(10-9米)量级,距离太大不能获得样品表面的信息,距离太小会损伤探针和被测样品,反馈回路(Feedback)的作用就是在工作过程中,由探针得到探针-样品相互作用的强度,来改变加在样品扫描器垂直方向的电压,从而使样品伸缩,调节探针和被测样品间的距离,反过来控制探针-样品相互作用的强度,实现反馈控制。因此,反馈控制是本系统的核心工作机制。
本系统采用数字反馈控制回路,用户在控制软件的参数工具栏通过以参考电流、积分增益和比例增益几个参数的设置来对该反馈回路的特性进行控制。
2. 原子力显微镜/AFM的硬件结构
如下图所示。原子力显微镜AFM的系统可分成三个部分:力检测部分、位置检测部分、反馈系统。
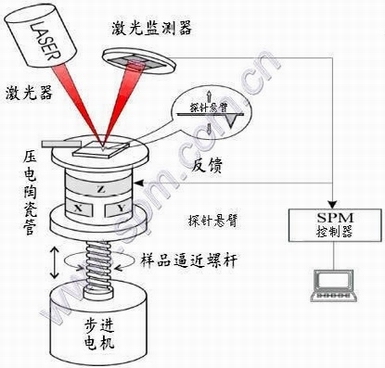
原子力显微镜(AFM)系统结构
2.1 力检测部分
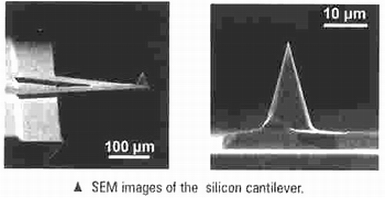
在原子力显微镜/AFM的系统中,所要检测的力是原子与原子之间的范德华力。所以在本系统中是使用微小悬臂(cantilever)来检测原子之间力的变化量。微悬臂通常由一个一般100~500μm长和大约500nm~5μm厚的硅片或氮化硅片制成。微悬臂顶端有一个尖锐针尖,用来检测样品-针尖间的相互作用力。这微小悬臂有一定的规格,例如:长度、宽度、弹性系数以及针尖的形状,而这些规格的选择是依照样品的特性,以及操作模式的不同,而选择不同类型的探针。
以下是一种典型的AFM悬臂和针尖:
2.2 位置检测部分
在原子力显微镜/AFM的系统中,当针尖与样品之间有了交互作用之后,会使得悬臂cantilever摆动,所以当激光照射在微悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作信号处理。
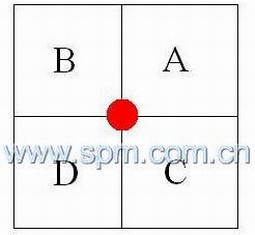
上图是激光位置检测器的示意图。聚焦到微悬臂上面的激光反射到激光位置检测器,通过对落在检测器四个象限的光强进行计算,可以得到由于表面形貌引起的微悬臂形变量大小,从而得到样品表面的不同信息。
2.3 反馈系统
在原子力显微镜/AFM的系统中,将信号经由激光检测器取入之后,在反馈系统中会将此信号当作反馈信号,作为内部的调整信号,并驱使通常由压电陶瓷管制作的扫描器做适当的移动,以保持样品与针尖保持一定的作用力。
AFM系统使用压电陶瓷管制作的扫描器精确控制微小的扫描移动。压电陶瓷是一种性能奇特的材料,当在压电陶瓷对称的两个端面加上电压时,压电陶瓷会按特定的方向伸长或缩短。而伸长或缩短的尺寸与所加的电压的大小成线性关系。也就是说,可以通过改变电压来控制压电陶瓷的微小伸缩。通常把三个分别代表X,Y,Z方向的压电陶瓷块组成三角架的形状,通过控制X,Y方向伸缩达到驱动探针在样品表面扫描的目的;通过控制Z方向压电陶瓷的伸缩达到控制探针与样品之间距离的目的。
原子力显微镜/AFM便是结合以上三个部分来将样品的表面特性呈现出来的:在原子力显微镜/AFM的系统中,使用微小悬臂(cantilever)来感测针尖与样品之间的相互作用,这作用力会使微悬臂摆动,再利用激光将光照射在悬臂的末端,当摆动形成时,会使反射光的位置改变而造成偏移量,此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整,最后再将样品的表面特性以影像的方式给呈现出来。
3.原子力显微镜(AFM)的工作模式
原子力显微镜(AFM)的工作模式是以针尖与样品之间的作用力的形式来分类的。主要有以下几种:
3.1 接触模式
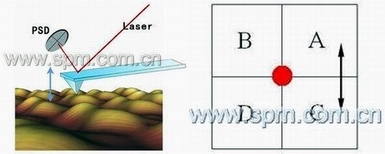
将一个对微弱力极敏感的微悬臂的一端固定,另一端有一微小的针尖,针尖与样品表面轻轻接触。由于针尖尖端原子与样品表面原子间存在极微弱的排斥力(10-8~10-6N),由于样品表面起伏不平而使探针带动微悬臂弯曲变化,而微悬臂的弯曲又使得光路发生变化,使得反射到激光位置检测器上的激光光点上下移动,检测器将光点位移信号转换成电信号并经过放大处理,由表面形貌引起的微悬臂形变量大小是通过计算激光束在检测器四个象限中的强度差值(A+B)-(C+D)得到的。将这个代表微悬臂弯曲的形变信号反馈至电子控制器驱动的压电扫描器,调节垂直方向的电压,使扫描器在垂直方向上伸长或缩短,从而调整针尖与样品之间的距离,使微悬臂弯曲的形变量在水平方向扫描过程中维持一定,也就是使探针-样品间的作用力保持一定。在此反馈机制下,记录在垂直方向上扫描器的位移,探针在样品的表面扫描得到完整图像之形貌变化,这就是接触模式。
3.2 横向力/摩擦力显微镜(LFM)
横向力显微镜(LFM)是在原子力显微镜/AFM表面形貌成像基础上发展的新技术之一。工作原理与接触模式的原子力显微镜/AFM相似。
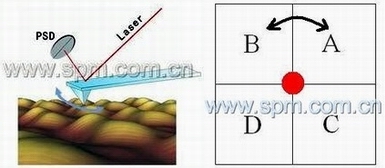
当微悬臂在样品上方扫描时,由于针尖与样品表面的相互作用,导致悬臂摆动,其摆动的方向大致有两个:垂直与水平方向。一般来说,激光位置探测器所探测到的垂直方向的变化,反映的是样品表面的形态,而在水平方向上所探测到的信号的变化,由于物质表面材料特性的不同,其摩擦系数也不同,所以在扫描的过程中,导致微悬臂左右扭曲的程度也不同,检测器根据激光束在四个象限中,(A+C)-(B+D)这个强度差值来检测微悬臂的扭转弯曲程度。而微悬臂的扭转弯曲程度随表面摩擦特性变化而增减(增加摩擦力导致更大的扭转)。激光检测器的四个象限可以实时分别测量并记录形貌和横向力数据。
3.3 轻敲模式
用一个小压电陶瓷元件驱动微悬臂振动,通过扫频得到微悬臂探针的固有频率和共振峰,再把驱动频率设置再探针固有频率附件(一般是略小于探针固有频率),使探针处于“共振”状态并以恰当的振幅振动。当探针接近样品表面后,震荡的探针针尖“敲击”到样品,使得其振幅变小。探针与样品越接近、针尖对样品的“敲击”强度越大、针尖的振幅越小。因此,当探针经过表面隆起的部位时,探针与样品的实际距离就小了,故其振幅便变小;反之,探针经过表面凹陷处时,其振幅便增大,反馈装置根据探针尖端振动情况的变化而改变加在Z轴压电扫描器上的电压,从而使振幅(也就是使探针与样品表面的间距)保持恒定。同STM和接触模式AFM一样,用Z驱动电压的变化来表征样品表面的起伏图像。
在该模式下,扫描成像时针尖对样品进行“敲击”,两者间只有瞬间接触,克服了传统接触模式下因针尖被拖过样品而受到摩擦力、粘附力、静电力等的影响,并有效的克服了扫描过程中针尖划伤样品的缺点,适合于柔软或吸附样品的检测,特别适合检测有生命的生物样品。
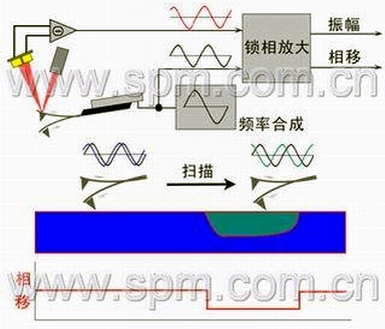
3.4 相移成像模式(Phase Imaging)
作为轻敲模式的一项重要的扩展技术,相移模式(相位移模式)是通过检测驱动微悬臂探针振动的信号源的相位角与微悬臂探针实际振动的相位角之差(即两者的相移)的变化来成像。
引起该相移的因素很多,如样品的组分、硬度、粘弹性质等。因此利用相移模式(相位移模式),可以在纳米尺度上获得样品表面局域性质的丰富信息。迄今相移模式(相位移模式)已成为原子力显微镜/AFM的一种重要检测技术
3.5 抬起模式
抬起模式的目的是让探针离开样品表面,并保持与样品表面恒定的距离对样品进行扫描,从而获得探针与样品间的长程力(如磁力、静电力等)。
如果探针在样品上方离开一定距离进行直线扫描运动,由于在微观上样品表面的起伏,扫描过程探针和样品实际距离将随样品起伏而变化。因此,为了实现探针与样品距离恒定的目标,就必须采用每个扫描行由两次扫描来完成方式:第一次行扫描以常规的成像方式(通常以轻敲模式)得到该行样品的表面的起伏信息,然后让探针抬起一定高度,沿第一扫描得到的表面起伏轨迹保持恒定距离再扫描一次,检测探针的振幅或相位的变化。具体步骤如下:
- 在样品表面扫描,得到样品的表面形貌信息,这个过程与在轻敲模式中成像一样;
- 探针回到当前行扫描的开始点,增加探针与样品之间的距离(即抬起一定的高度),根据第一次扫描得到的样品形貌,始终保持探针与样品之间的距离,进行第二次扫描。在这个阶段,可以通过探针悬臂振动的振幅和相位的变化,得到相应的长程力的图像;
- 在抬起模式中,必须根据所要测量的力的性质选择相应的探针。
抬起模式也是目前扫描探针显微镜的一个重要工作模式,磁力显微镜(MFM)、静电力显微镜(EFM)和扫描开尔文探针显微镜(SKPM)就是基于抬起模式实现的。上述几种抬起模式的具体应用技术,可查阅磁力/静电力显微镜和扫描开尔文探针显微镜页面。
3.6 曲线测量
SFM除了形貌测量之外,还能测量力对探针-样品间距离的关系曲线Zt(Zs)。它几乎包含了所有关于样品和针尖间相互作用的必要信息。当微悬臂固定端被垂直接近,然后离开样品表面时,微悬臂和样品间产生了相对移动。而在这个过程中微悬臂自由端的探针也在接近、甚至压入样品表面,然后脱离,此时原子力显微镜/AFM测量并记录了探针所感受的力,从而得到力曲线。Zs是样品的移动,Zt是微悬臂的移动。这两个移动近似于垂直于样品表面。用悬臂弹性系数c乘以Zt,可以得到力F=c·Zt。如果忽略样品和针尖弹性变形,可以通过s=Zt-Zs给出针尖和样品间相互作用距离s。这样能从Zt(Zs)曲线决定出力-距离关系F(s)。这个技术可以用来测量探针尖和样品表面间的排斥力或长程吸引力,揭示定域的化学和机械性质,像粘附力和弹力,甚至吸附分子层的厚度。如果将探针用特定分子或基团修饰,利用力曲线分析技术就能够给出特异结合分子间的力或键的强度,其中也包括特定分子间的胶体力以及疏水力、长程引力等。
3.7 纳米加工
扫描探针纳米加工技术是纳米科技的核心技术之一,其基本的原理是利用SPM的探针-样品纳米可控定位和运动及其相互作用对样品进行纳米加工操纵,常用的纳米加工技术包括:机械刻蚀、电致/场致刻蚀、浸润笔(Dip-Pen Nano-lithography,DPN)等。
我公司的图形化纳米加工系统采用的是纳米加工中的电致刻蚀方法,电致刻蚀主要由施加在探针与样品表面间的一个短的偏压脉冲引起,当所加电压超过阈值时,暴露在电场下的样品表面会发生化学或物理变化。这些变化或者可逆或者不可逆,其机理可以直接归因于电场效应,高度局域化的强电场可以诱导原子的场蒸发,也可以由电流焦耳热或原子电迁移引起样品表面的变化。通过控制脉冲宽度和脉幅可以限制刻蚀表面的横向分辨率,这些变化通常并不引起很明显的表面形貌变化,然而检测其导电性、dI/dS、dI/dV、摩擦力可以清晰地分辨出衬底的修饰情况。
图形刻蚀模式:通过加载图图案或者图形文件,设定相应的加工参数,系统自动控制探针按对应的图案进行纳米刻蚀。
矢量扫描模式:系统提供一个向量脚本编译器,允许用户任意指定扫描方向、距离、速度及加工参数(如作用力、电流、电压等),直接操纵探针运动,同时灵活测定各种信号和数据。